The Invisible Co-Pilot: Beyond Basic Cruise Control
Modern driving assistants have transformed highway travel, but many drivers still misunderstand the technology behind adaptive cruise control (ACC) and lane‑keeping systems (LKS). Unlike traditional cruise control, which locks to a fixed speed, ACC and LKS work together as a semi‑automated network of sensors, actuators, and control software. Here’s a clear, technical look under the hood.
How Adaptive Cruise Control Maintains Distance and Speed
The Sensor Fusion Approach
ACC relies on three primary sensors: a forward‑facing radar (usually 77 GHz), a camera behind the windshield, and sometimes ultrasonic sensors for low‑speed validation. The radar measures relative speed and distance to the vehicle ahead using the Doppler effect. Simultaneously, the camera identifies lane markings, taillights, and the shape of the preceding car. By fusing these data streams, the system decides whether the path is clear or obstructed.
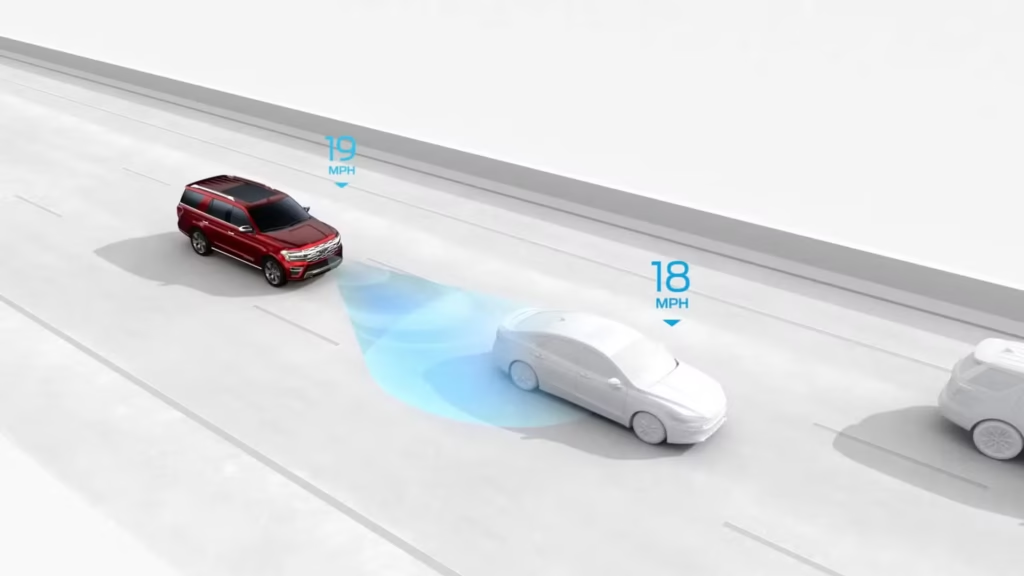
The Control Loop: Target Following vs. Speed Holding
When no vehicle is detected ahead, ACC behaves like standard cruise control, maintaining the driver‑set speed (e.g., 120 km/h). Once a slower vehicle enters the same lane, the system transitions to following mode. It calculates a desired gap based on a time‑interval setting (commonly 1.0 to 2.2 seconds). The engine control unit (ECU) adjusts throttle and, if needed, applies the brakes via the electronic stability control (ESC) pump. Modern ACC can decelerate at up to 0.3–0.4 g—enough to match traffic without driver intervention.
Stop‑and‑Go Extension
Premium ACC systems include stop‑and‑go functionality. Even after braking to a standstill, the system holds the car for 3–5 seconds. If the pause lasts longer, a tap of the accelerator or a “resume” button reactivates following. This uses brake‑by‑wire and the hydraulic control unit to maintain pressure while stopped.
How Lane Keeping Systems Recognize and Steer
Lane Detection Through Image Processing
A monocular camera (typically 1.3–2.5 megapixels) captures 30–60 frames per second. Dedicated image processors apply edge detection algorithms—often based on Canny or deep learning segmentation—to find lane boundaries. The system looks for high contrast between asphalt and markings, filtered for typical lane widths (2.5–4.5 meters). Curved lanes are modeled as second‑order polynomials (clothoid paths).
Two Types of Lane‑Keeping: Warning vs. Active Centering
- Lane Departure Warning (LDW) triggers a vibration or beep when the car drifts without a turn signal. No steering torque is applied.
- Lane Keep Assist (LKA) gently counter‑steers to nudge the vehicle back between the lines. Torque is limited (typically 3–5 Nm) so the driver can always override.
- Lane Centering (used in Level 2 systems) constantly steers to keep the car dead center. This requires a more sophisticated controller (PID or model predictive) that predicts lane curvature ahead.
The Role of Electric Power Steering
LKA cannot work without electric power steering (EPS). The lane‑keeping computer sends torque commands to the EPS motor, which adds steering assistance. A torque sensor at the steering column measures driver input: if the driver fights the system, LKA yields control immediately. Torque is applied asymmetrically (push on one side, pull on the other) to gently correct heading.
How They Cooperate: From Separate Features to Highway Autonomy
ACC and LKA are genuinely independent on most cars—each has its own ECU and fails silently if sensors are blocked. However, on premium systems (Tesla Autopilot, Ford BlueCruise, GM Super Cruise), a domain controller merges their data. For example, if ACC brakes hard, the lane centering might temporarily reduce steering authority because the vehicle’s pitch could misalign the camera. Conversely, if lane markings vanish, ACC continues following the car ahead while lane keeping enters a “standby” state.
Critical Limitations Every Driver Must Know
- Stationary object detection – Most ACC cannot see stopped vehicles beyond 80 m or at high closing speeds (e.g., a traffic jam around a blind curve).
- Poor lane markings – Snow, shadows, or faded paint cause LKA to disengage silently.
- Cut‑in situations – When a car merges suddenly, radar takes 0.5–1 second to lock on, sometimes requiring driver braking.
- Sensors in bad weather – Heavy rain or snow can attenuate radar signals and blind the camera.
Conclusion: An Assistant, Not an Autopilot
Adaptive cruise control and lane keeping are among the most sophisticated real‑time control systems in consumer vehicles. They reduce fatigue on long trips and add a safety net, but their physics‑based limitations remain. Understanding the difference between radar’s Doppler tracking and the camera’s pattern recognition—and knowing exactly when each sensor fails—turns a casual user into a genuinely safer driver. Always keep your hands on the wheel and your attention on the road.

